����������
���� �����������ں�
A�� �ں�Ч����������D��
B��һ�д��a��
a = (1 - d%) * b + d% * c;
a �� �ں�ݔ�� ��b ���A�y����c ���^����
�@���P�I���ںϴ��a��
C���ᆖ��
�������a�ĺ��x��ʲô��
�ә�ƽ�������a�V������ͨ��ͨ�V������
ͬ�ӵ�ʽ�ӣ���ͬ��ʹ���^�̣��в�ͬ�����x��
���ϵ����һ���̶���ֵ���t�п����Ǽә�ƽ�����߸�ͨ��ͨ�V������
���v���DŽӑB��ϵ�����@ȡ������׃�������f�����׃��ϵ������׃��
D�����⣺
1��ʲô��rʹ�� �� ��˹�ֲ���
��ģ������͡���˹�� ����˹��������֮ǰ�f���˂������������ڰ�����
2����������ʲô����ѹ�Ӌ ������ʹ����С���ˁ����⡣
�ƌ���ʽһ��
q1 ���A�y����q2���^������q�ǹ�Ӌֵ��w�Ǚ�ֵ�����ā��ԡ������ƄәC���ˌ�Փ����
����q1��q2��ϵ��֮�͞�1��
�����@�N�ƌ���ʽ���f������������ѹ�Ӌ�����Dz������Ƴ�����ı��_ʽ�����ң���ֵWi߀���҂��Լ�ȡ�ġ�
�ƌ���ʽ����
�\��ؐ�~˹�����ƌ����Ƴ��ںϱ��_ʽ�ͷ�����_ʽ
3���������ĺ��ġ� ��������f���ء��䌍���ǿ��������档
���ʽ���������ƣ��Y����ԭ����߶�С����˾������A�y�����۷e�`���^��Ҳ�����ϵ�y�ľ��ȣ��`��ͨ�^�������p�١��@�f����ԓ��������Ч�ԡ�
4���@�ÿ���������ķ�ʽ���ȣ�
�Ԅ�ͨ�^�yӋ��Ӌ�㔵������ VS �˞齛��Ӌ���� �Č��� ��
1���Ԅ���Ҫ���l�������˞齛�á�
2���ԄӾ���ͨ���ԣ��˞��ض��ԡ�
3���Ԅ�Ӌ�������˞��Ӌ�����^�١�
��5.35���Ƴ���q = (d%) * q1 + (1-d%) * q2;
5�����ã��҂����ˑB�ںϣ���λ�ں϶����˞�o������������ϵ���ģ�����������Ϳ������V������
���֮Մ��
A������һ���ǽo�ĺ�С��ԭ��������������������`��ģ�����P��
����С��ԭ���������������ʽ�ӣ��A�y���ķ����^С���^�y���ķ����^����ͬһ�����������������ϵ��һ��o�ĺ�С��Ҋ��λ�ںψD���ɿ���������r��
B��������Ϳ������V�����ĺ���˼����׃������������ϵ������������҂���֪����Щ�l�������������ķ������Щ�l���·���С���Ķ���׃����ϵ����
C���ںϾ��̵��l��Խ��Խ�á��l�ʸߣ�һ�����Ք��죬����һ����@�õ��A�y���`��С��
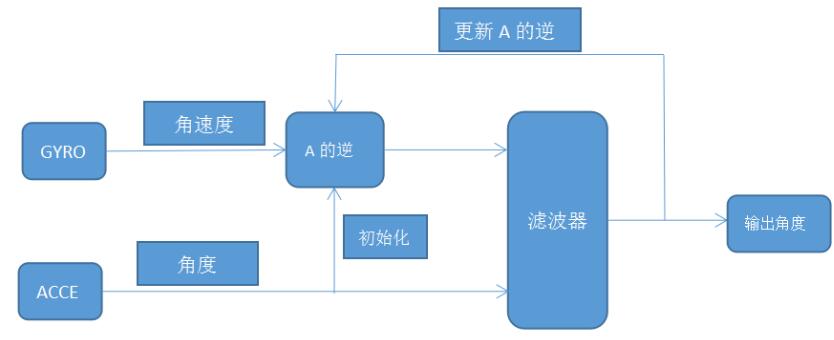
�ġ� �ˑB��������
�������Ԕ������ķ�ʽȥ���⡣
1��������ԭʼ����ݔ�롣
2���������˶��������ܶ࣬�������淨���ј˶���Ĕ����Q��ɘ˜ʆ�λ��
3���_�������S�͔�����̖����̖�����ֶ��t��
4���W����׃�Q������Ԫ��׃�Q��׃�Q�Ǟ���ʹ���݃x���ٶȵ�����ϵ�c���ٶ�Ӌ�������غϡ�
5�������ںϣ��pС�����������
6��ݔ���ںϺ���ˑB��Ϣ��
�塢 DMP
�@��MPU6X00оƬ���Ԏ����ܡ����_Դ��
����߀���e���������á�Ӌ����һ����������IMU�������YԴ�����^��هоƬ�a�̡�
���������ںό��Ч����
A�� �ˑB�ں�Ч�����{ɫ�ľ����ں�ݔ����ƽ������푑��졣
B����λ�ں�Ч�����Gɫ�ľ����ں�ݔ�����{ɫ�ľ����^�y�����tɫ���A�y����
ϵ��highspeedlogic
QQ ��1224848052
�ţ�HuangL1121
�]�䣺1224848052@qq.com
�Wվ��http://www.mat7lab.com/
�Wվ��http://www.hslogic.com/
�Œ�һ�ߣ�